Hello, everyone.
This topic was created to concentrate all questions and suggestions you might have about the Soccer Simulation Demo of February 2021.
As we mentioned in the call, the idea of this demo competition was to serve as a trial for the official simulation competition to be held in June 2021. To help us improve, we welcome your suggestions and observations about the whole process.
If you want to report a bug or issue observed during the matches, please try to give as much detail as possible to help us identify the problem: identify your team, the exact match and time stamp you are referring to, and explain what you think the problem is.
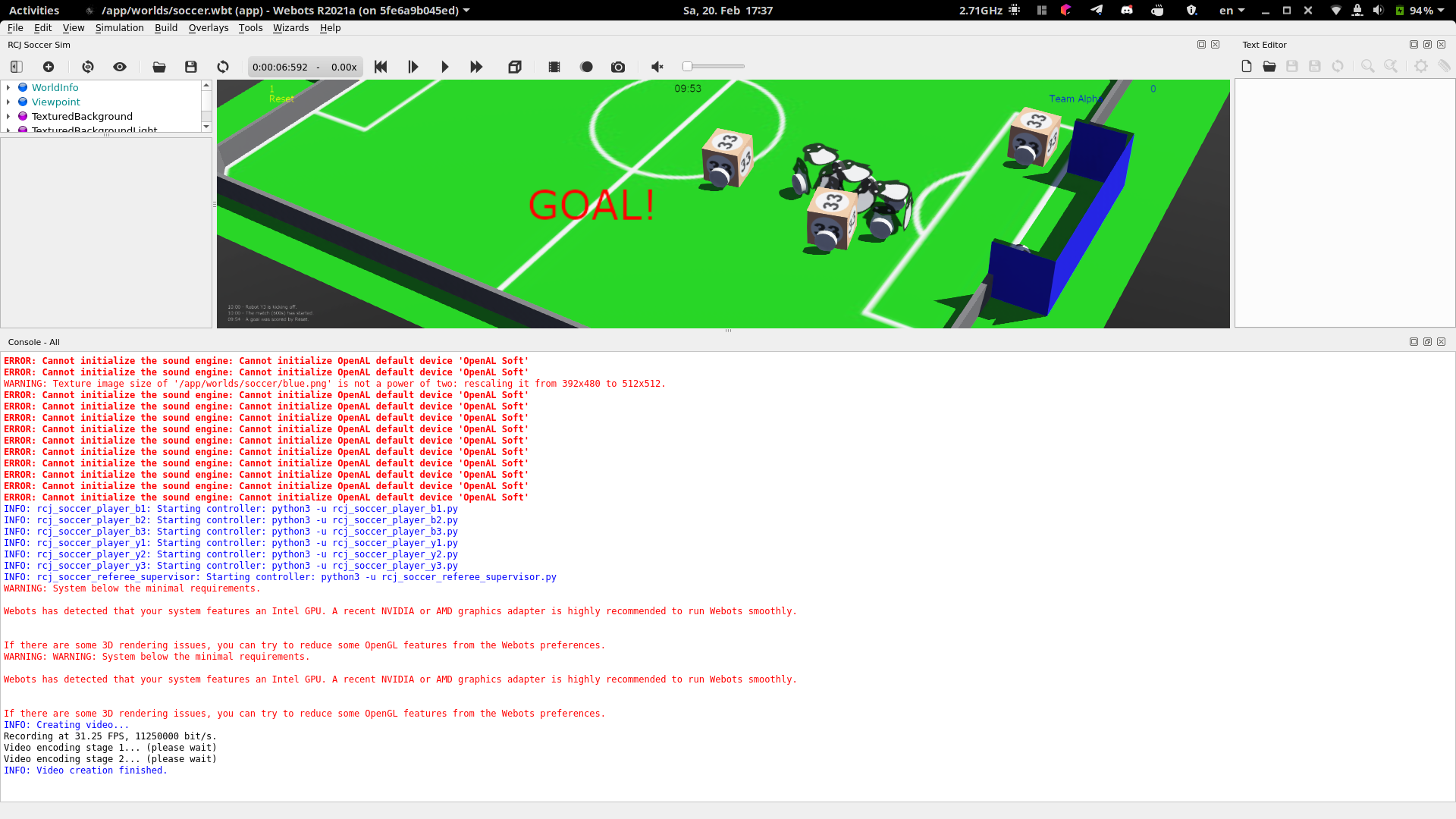
The links for results and videos of all games can be found in the following topic: Soccer Simulation Demo 2021 - Results
On behalf of the RCJ Soccer TC and RCJ Soccer Simulation OC, I thank you all in advance!
Felipe.
P.S. 1: Please, note that we will not re-run matches. As stated before, we are having this demo competition to learn what we need to improve in order to have a good competition in June. We understand that this might be frustrating, but running the competition is taking much more time and effort than we anticipated and we simply don’t have the capacity to replay matches at this point.
P.S. 2: If you are looking for the simulator or competition rules, check out the post below: Soccer Simulation Demo Competition 2021





 , the fix is on its way to be merged soon (
, the fix is on its way to be merged soon (