Let’s continue the discussion on IR emissions and IR sensing for LWL here, I’ll quote the two corresponding posts from here below.
I want to add for completeness here the idea thrown around at RCJ Bangkok that we could publish a list of validated, known-good setups (i.e. two lists: One list of lidars that don’t resembled the ball too much and one list of ball sensor setups that detect the ball well while filtering out all the lidars on the known-good lidar list reliably). It would then become possible to have a simple PCB that has one of each sensor on it that could be used to detect problematic IR emissions.
The disadvantage of this solution is that it is a lot of effort to implement, might dissuade teams from innovating on sensors to be on the safe side and that if we make a mistake in validation we have a situation on our hands where teams are blameless but we still cannot play a fair game.
Hi Mike,
yes, it is exactly the VL53LXX sensors that cause problems.
They work on the exact same wavelength as the IR-Balls.
My beginner teams simply measure the IR-intensity in a ring with 14 ir sensors.
And a laser pointing to a wall that is not a mirror but a rough surface does reflect and spread the lidar IR light and that is more intense than the balls IR light.
We experienced this distraction with multiple other teams and just the beginner teams did not even know whats going on, their robot just did not work as expected when playing against a lidar team.
Especially because their robot did not “follow the other robot” as before with the sharp sensors, but just did not go for the ball sometimes.
And this is exactly what we should avoid!
We already had bought some of these VL53-lidar - sensors and decided not to use them for that very reason.
So in my opinion we should stick to the clear rules and ban these sensors to give the less experienced teams a chance to build easy IR-ball-sensors.
I would like to see a validated “white list” of ir-lidars such as David recommended.
We had one team from “Bodensee/Germany” using sensors with a smaller wavelength (830nm?) that did not distract our robots, but I am not sure if this is valid for all other robots.
So I would recommend to strenghten the rule for 2023 as mentioned before and have a testing place for new sensors at the competition to evaluate a white list for 2024.
I am happy to to provide an “as simple as possible” IR detection board for testing at the German open, the European open and the world championship if wanted.
What do you think?
Sorry Roland for misunderstanding - there does seem to be clear interference going on; I also didn’t consider the reflection/diffusion of the light off of the walls,etc.
Another ToF sensor that Adafruit sells, the VL6180, does say it is 850nm which is lower than the 940nm emitted by the ball and VL53xx but I wonder if they could still interfere under the right circumstances. Since the rule is under the interference section, it is already implied that this rule is really only enforced if interference occurs (a situation I know you wanted to avoid but now that it is realized hopefully resolved quickly).
I’m not sure if it’ll be worth the effort to attempt a white list - there are simply too many variables at play other than the wavelength. May be best to err on the side of caution and still tell teams to avoid anything that emits significant light above 700nm (technically, any light source like this white led emits some IR light!).
I’m not sure if requiring an IR detector at inspection is necessarily warranted. Not only would this be an extra cost and strain on local organizers, I worry about how sensitive it could be and if teams could run into an issue of passing inspection at one event and failing at another. I don’t see the issue with recommending having something other than a digital camera (some won’t filter out IR and show it as purple) for peace of mind though!
Now that you have exposed the issue, could it be argued that these sensors are easy to spot and could simply be covered with black electrical tape,etc.?
I started to draft a clarified rule but realized that it’ll just be adding to an already lengthy document. --edit-- we have a draft of ref training videos that will hopefully be published in the next few months and cover inspection, instead of changing the rules, how about we specifically mention these sensors and that they either need to be removed or covered up in the training?
Hi Mike,
I did not know the part number, but the VL6180 looks to me to be the sensors that did not interfere.
This is due to the lower wavelength of 850nm.
So I think this device should be fine, but you are right, it could cause interference on other IR-sensors then the ones we use.
I do not agree with the interpretation of the rules
Since the rule is under the interference section, it is already implied that this rule is really only enforced if interference occurs
My interpretation of the line " In Lightweight, the robot must not emit infrared light" is that in Lightweight, the robot must not emit infrared light.
Especially if you read the next line where there is a clear restriction with “as long as other robots are not affected”
So if there are different possibilities of understanding the first line just modify it for the final rules.
If we want to have this rule only being enforce if another robot can prove to be affected, then we should write it there.
But again, I think especially the inexperienced teams will not even notice that the robots is affected as the behavior is not an easy “robot follows other robot”.
Of course covering these sensors is easy and much less complicated then removing them.
So this would be an easy solution on the championship.
I see your point about new teams not knowing whether or not they’re being affected. The question I’m struggling with is how far do we go in strengthening the rule to allow for robots that may not filter at all/have easily affected ball detection (e.g. just reading voltage drop of a phototransistor with a clear lens). In case teams are reading this that don’t know - the IR ball emits the IR at a specific carrier frequency as well as wavelength and photo-receivers like ones mentioned in the rules can filter for that - see the appendix on the IR ball in the rules for details!.
As its written, we probably have been bending the rules and allowing for teams to have LEDs on their robots that are designed to emit a majority of light in the visible wavelengths but still emit some IR. How about this: “Components designed to emit IR (e.g. IR time-of-flight LiDAR sensors) are not allowed and must be covered or removed if present at all. Any device designed to emit light of any wavelength must be mounted so that light is directed perpendicular to the playing field or be covered/removed.”?
I think we’re on the same page, I’m just getting wrapped up in the literal interpretation of the rule v. the intent  . What do you think?
. What do you think?
Hi Mike,
your suggestion sounds perfect to me. It makes clear that an IR-sender is not allowed but prevents from arguing about “normal” light sources like status LEDs.
Yes, great, thanks for your effort !
Roland
Hi everybody,
there is a PR currently under construction to incorporate this clarification into the 2023 draft rules: Pull Request #80 · RoboCupJuniorTC/soccer-rules
Best Regards
David
Hi everybody,
The German team (Bodensee) has been using TOF sensors for many years. In the leagues 1vs1 and LWL. The TOF transmits with a wavelength of approx. 850nm. This wavelength is far away from the wavelength of the IR ball. We have never had any problems with our robots jamming. We used the LANBAO PSK-CM10. The intensity of the IR ball can be evaluated using an IR filter or the carrier frequency. This works very well and is also doable for beginners. The components used are disclosed in the posters. It is therefore very easy to clarify whether these components are permissible. Look at the data sheet. My suggestion is therefore only to ban the IR range around the transmission frequency of the IR ball. ±50nm would be a good value. So only the range 900nm to 1000nm.
I am against blocking the entire IR range. We are thus blocking the possibility of using the latest technology in the TOF area and LIDAR area
greeting
Joachim
Hi @Joachim. If you haven’t done so, please read the original post that spurred this discussion as we did bring up some of the points about filtering and wavelength.
I believe you when you say you never had any issues with your robots jamming; the issue is whether or not that holds true for all potential design solutions for ball tracking. I’ve seen teams be challenged enough given the variability in the carpet - how can we know for sure that a team’s tracking solution is not going to be impacted by other robots emitting and reflecting IR, at any wavelength, around the field? Maybe your robots only use four sensors, were mounted high enough, etc. and it didn’t create enough noise to have a noticeable impact on the tracking solution you were implementing? There hasn’t been anything posted here that guaranties that all implementations of sensors designed to emit light outside of 940nm wavelength will not interfere with any design used to track the ball in all conditions.
Your proposal also puts more pressure on the inspection process; we would now have to train inspectors to be able to read datasheets, somehow verify they are correct (e.g. have no tools to test IR wavelength), and verify they match what is mounted on the robot. Teams would now have to worry about bringing the correct datasheets (correctly translated) and navigate more complexity in an already complex rule set.
You said you were using the ToF sensors for years which either means the inspectors didn’t catch that you were breaking the rule or that inspectors understood that the intent of the rule is to prevent interference and had the belief of “no interference - no foul”. However, as pointed out in this thread, it is difficult to determine if interference is even occurring especially for rookie teams.
On the other side of the tradeoff - what are we really gaining by making an attempt to whitelist ToF sensors? In terms of educational value, my experience has been that ToF sensors are far from open source/open hardware (e.g. even the register map for the VL53L0X doesn’t seem available from the manufacturer and I could only find a incomplete crowd sourced version). Teams are also going to be given the opportunity to work with them in open league.
When this thread first began, I would have agreed with you. What pushed me over the edge is the argument that we will likely never be sure that there won’t be interference. The rules already suggest IR filtering like you mentioned in the appendix. We’ve all heard the team that said “it was working when we practiced!”; it is a hard thing to hear. It is also hard to think that teams may have lost function and either didn’t speak up about it or didn’t realize it. The tradeoff of allowing sensors that teams will get to experience in the open league anyway doesn’t seem worth the risk of a another team losing function, the effort it would take confirm the anecdotes presented here, and the extra effort to properly enforce a whitelist.
Why did your teams go with LiDAR instead of ultrasonic sensors by the way?
Hi David
Here are the reasons why we switched to TOF/LIDAR. We always had problems with the reliability and accuracy of the US sensors (SRF08). Especially with fast robot movements and in unfavorable positions in the field. We chose a TOF/LIDAR that was technically better on the one hand and didn’t interfere with the IR ball recognition on the other. The TOF/LIDAR now has a resolution of 1mm and measures point-wise. We get good measurement results even when hitting a wall at an angle. The US has a divergence of ±30°, the TOF only ± 2°. Even with fast movements we get reliable results. The electrical and software connections are comparable. The TOF weighs 2g less. The TOF is mechanically more stable. The TOF costs slightly less than the US.
I hope you understand better now why we would like to ride with TOF.
Kind regards
Joachim
Hi Mike
Thank you for taking the trouble to answer me in such detail. I have already explained to David why we switched to TOF/LIDAR back then. For us, the return to US sensors is a technical step backwards.
On the other hand, I also understand your reasoning. How can the referees check the correct construction of the robots? I don’t have an answer for this yet.
I think in the long run you won’t be able to evade TOF technology. The technical demands on the robots are getting higher and higher, maybe one should also make higher demands on the ball recognition, so that TOF with 850nm are possible. Maybe in the 2024 rules.
Kind regards
Joachim
Hey @Joachim - no worries! Thanks for contributing to the discussion.
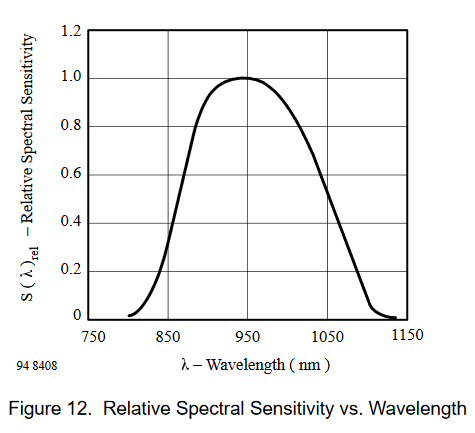
There was a significant discussion concerning this on the late open call last Wednesday (24/8/22). We even dug out some datasheets and found that sensors like TSOP1140 suggested in the rules do have some sensitivity in the 850nm wavelength (see snip from this datasheet below). This is probably the deal breaker for whitelisting any devices designed to emit IR at any wavelength in LWL as long as there is an active ball.
Hi Mike
We know that the TSOP still has a spectral sensitivity of 30% at 850nm. But is the TSOP the only solution? The IR ball emits a signal modulated at 40 kHz, there is also the option of evaluating this.
For information, our LIDAR emits an IR_signal in a 50Hz rhythm. The transmission time is only 5ms each time.
After the discussion, there are currently only 2 solutions for me. Either the original solution, that the opponent must not be disturbed, or you ban LIDAR technology. The second solution is easier to use, but is not the better solution.
Hi Joachim,
I think we’re having a misunderstanding here, this rephrasing does not change what is and isn’t allowed, it just points our that IR LiDARs also emit IR light to make it more clear that they are not allowed. Rules have stated
In Lightweight, the robot must not emit infrared light.
without exceptions or the concept of “but allowed as long as opponents are not disturbed” you seem to be referring to since 2010. The handling of interference claims only at the beginning of matches is just a provision to not derail tournaments by allowing last minute discussions but has no bearing on what is actually allowed on robots.
You have relied on the good will (i.e. implicit consent to play against a non-compliant robot) and/or obliviousness of your opponents and tournament organizers (which did not keep you from starting your non-compliant robot) to run something forbidden anyways. Please be aware when making these arguments that you are arguing for a significant rule change, not the status quo.
The reason we are keeping it this clear cut for the time being is that we need to be mindful of new teams that don’t have all the sophistication yet. So we would not want to permit the use of any IR equipment that we don’t have testing data for to lets us be confident that even new teams with “naive” IR sensors are not interfered with. If you have ideas on how to accomplish that we’re all ears, we even considered setting up a testing rig to validate active and passive IR sensors against each other and publish a “known good list” but don’t currently have the bandwidth to specify a testing procedure we would be confident in nevermind actually buying and testing all the combinations. Therefore we’ll have to ask you to contain the IR tech to Open League for now.
Best Regards
David
Hi David, to clear up any misunderstandings, we don’t intend to use TOP/LIDAR in LWL and 1vs1 until there are new rules.
Best regards
Joachim
Hello everyone, I don’t know if I’m in the right place here.
We use a photocell with an LED to detect the presence of the ball in the catch zone like other teams do. The light barrier is tangential to the robot and also arranged parallel to the playing field. The LEDs are red or green far from IR. We would like to continue to do so. The proposed rule change with perpendicular light beams would prohibit that. Then only a mechanical or US switch would remain.
How do you rate that?
Best regards
Joachim
Hey @Joachim - we just missed each other! - I started a new thread to discuss your concern here.
Also - I was going to test out the ToF sensors you were using and the TSOP to see how sensitive it would really be but realized that it would be difficult to verify that a team hasn’t modified a part designed to emit IR to serve as detection blocker! I’m not suggesting at all that this was your intent but we should keep in mind to avoid rule changes that could be exploited like this.
The final rules are now out and for the time being we went with “no IR” (so no change (yet)). If we can figure out a way to be confident that interference problems won’t happen I’d love to allow (maybe 2024 if we can do good testing?) as much as we can without breaking anything.
Best Regards
David