Hi there,
I absolutely agree with TeamFaabs.
It is quite a challenge to build an 18cm robot anyway - which is good!
It is quite a challenge to see the small golf ball, so the robot must become less high to see
the golf ball when it is near the robot - which is also good!
Both leads to not only smaller and lighter but also to slower robots that need to have more tactics.
If you stick to the very slow 1m/s rule for the ball and want a strong chipper there is simply no space to build both into the much smaller “inner space” of the “first level” of robot.
So either teams can try to build one(!) stronger device or just skip the technical challange with a chipper. And if we have a chipping device build in, why not use it?
I do like the suggestions of TeamFaabs.
I also agree with Marek that no restrictions at all could be too much.
But face it: the walls around the field are set to 22cm by rule.
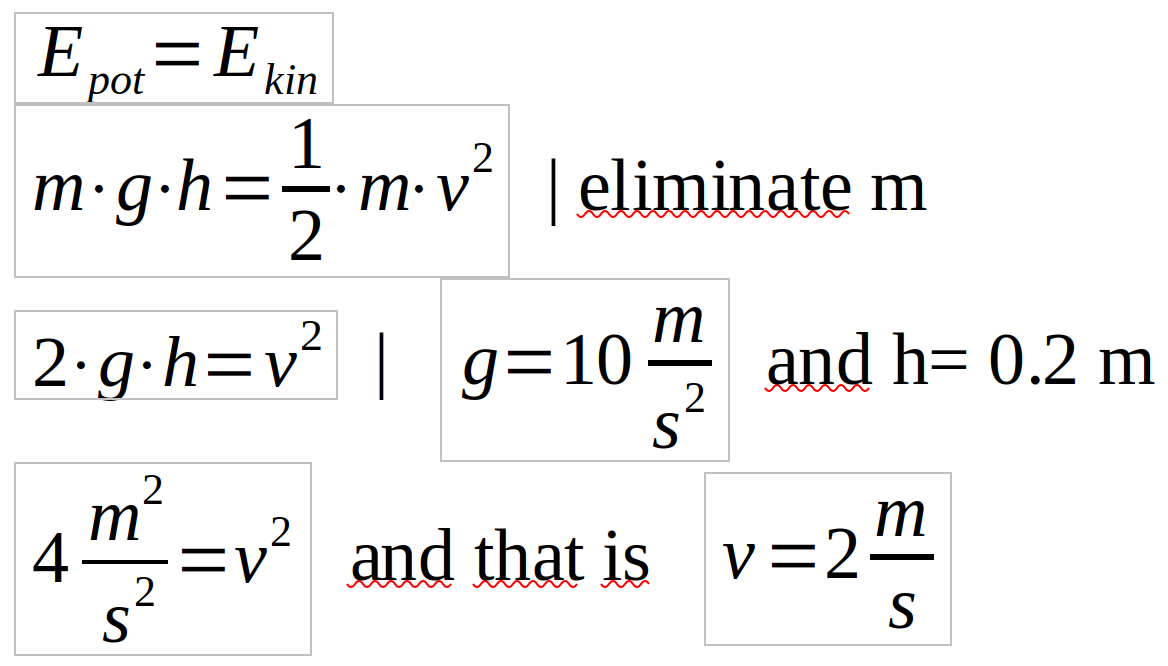
If we restrict the speed of the ball to never go higher than the walls we can use simple physics:
2 m/s is 4 times the power we are allowed to use now. That seems to bee inside the limits without the need of an “insane-mode”.
It also would ensure that the ball will not fly over the walls. That reduces the risk of injuries.
And than the technical challange…
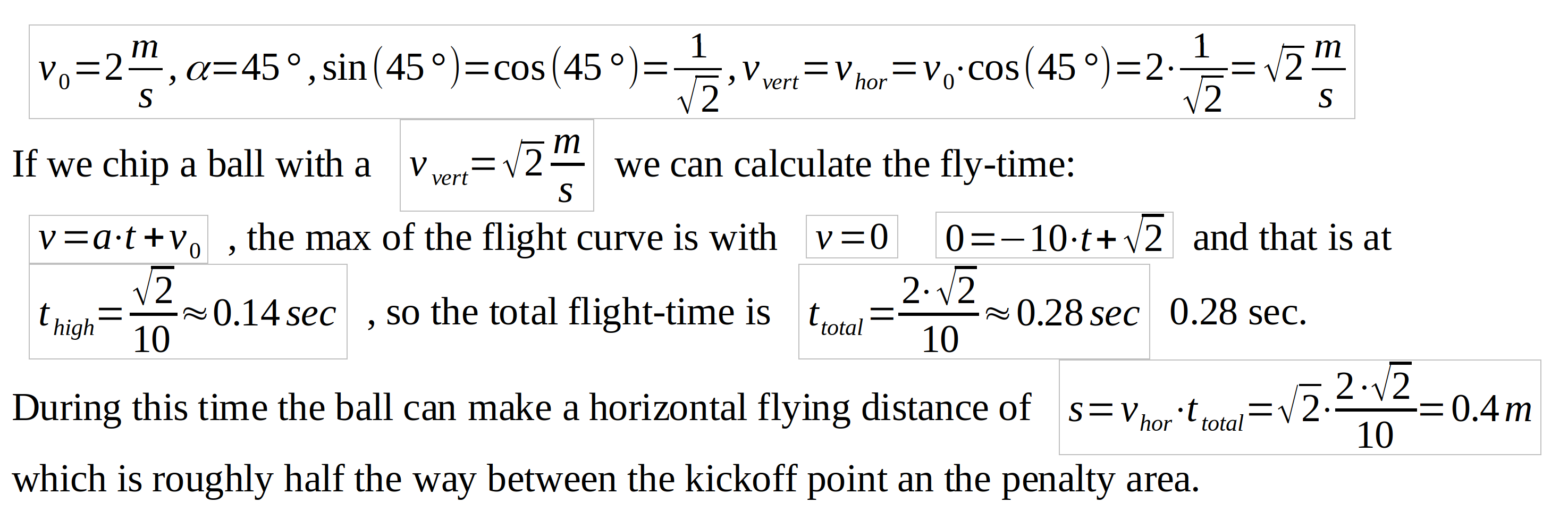
as any athlete knows, the best way to throw a ball is with an angle of 45 degrees.
So even if we double the allowed max speed of the ball, we are still far to slow to chip as wanted in the technical challenge draft rules.
I cannot think of any team building a chipper powerful enough to do the technical challenge in this very restricted space.
So what about a „step in the new direction“ by doubling the allowed speed to 2 m/s measure with a new 20cm high ramp and a technical challenge to chip the ball from one of the neutral spots near the goal into the penalty area. This is at least 22cm distance. This can be done without exceeding the allowed maximum power (2m/s speed).
And than we should allow this chipping during normal gameplay, so there is no need to have two devices.
The only problem I see is that the robots itself must me prepared to get hit by a flying golf-ball that could hit the optical equipment that is necessary to see the ball.
After writing all this I could imagine another scenario.
We increase the speed of the kicker/chipper accelerated golf-ball to the 2 m/s, measured with a 20cm ramp.
And than we have the technical challenge to chip a ball trough a window.
If we have a kickoff point 10cm away from the window an have a window that starts at a hight of 2cm and ends a a high of 10cm we can assure that it is a real chipping without encouraging the teams to have a 45 degree angle an so we could restrict the chipping hight to lets say 8cm to protect the robots sensitive area.
This technical challenge chipping window is easy to build and a real innovation without producing to many other problems.
What do you think about it?