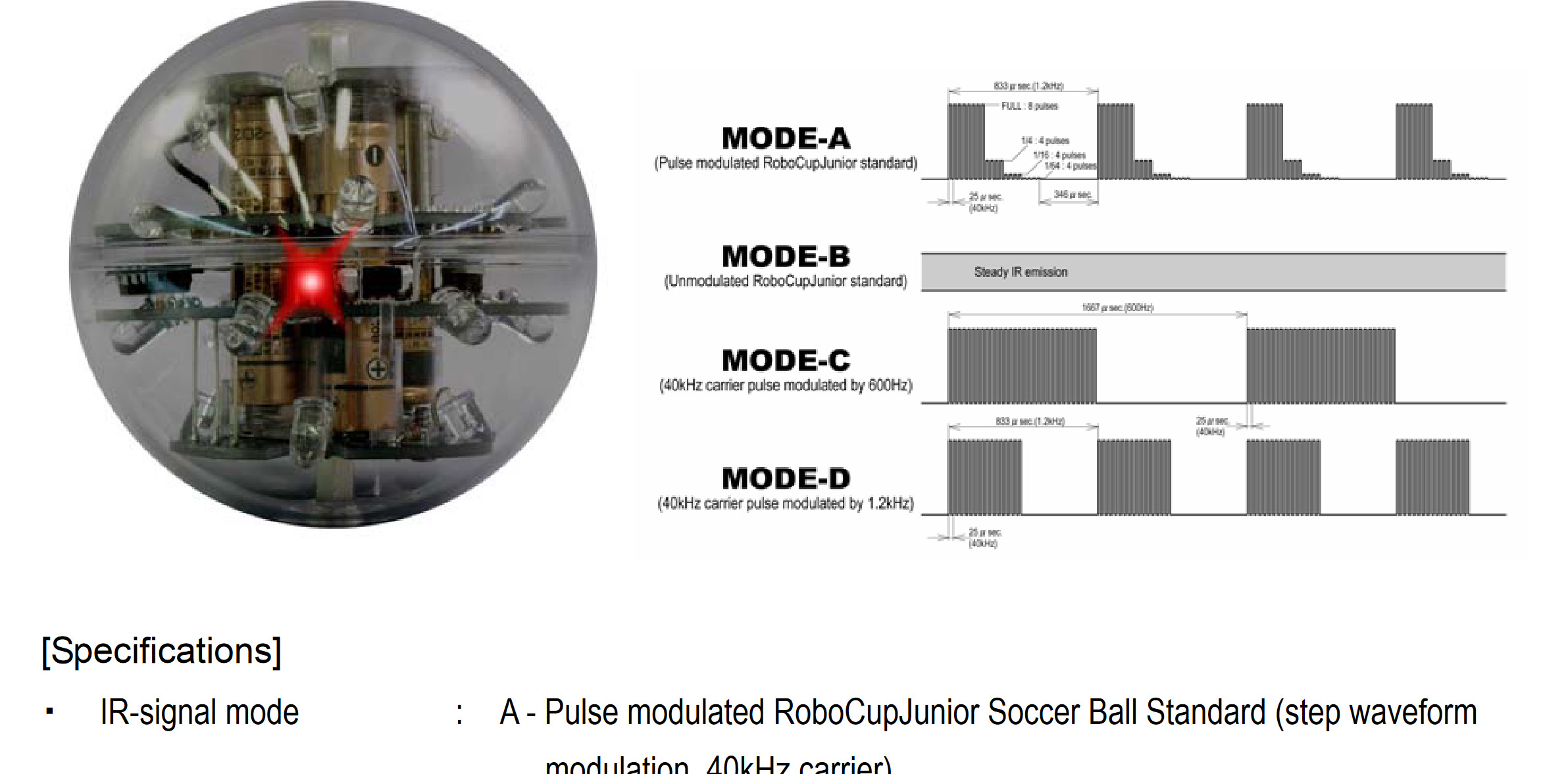
Hello, I think that we should change the IR ball modulation standard from mode A to mode D. For multiple reasons.
-
The original intention for using dimed pulses was to have some way of detecting the approximate distance from a ball using standard sensors such as TSOP1138 in the way that a higher distance meant fewer pulses would be detected (8-12-16-20). But in reality, because of insufficient uniformity of IR radiation from the ball and the non-linear part of the sensor pulse weight corresponding to irradiation distance information gained this way becomes unuseful and teams are only using direction information. When we change official modulation to mode D getting direction would work the same way as before and no modification would be needed.
-
There is also a problem with IR light bouncing from obstacles and walls so in the end there are multiple ‘paths’ from the IR ball to the sensor which is even more confusing for the sensor. When using mode D as the official way of modulation it would mean that all ‘dimed pulses’ are reflections and should be ignored when now reflection and dimed pulse could be easily mistaken when using mode A.
-
Using mode D would create a simpler path for understanding how this detection works for new teams and would also make a more easy path for new teams. Also would make new designs of the ball simpler and less expensive.
-
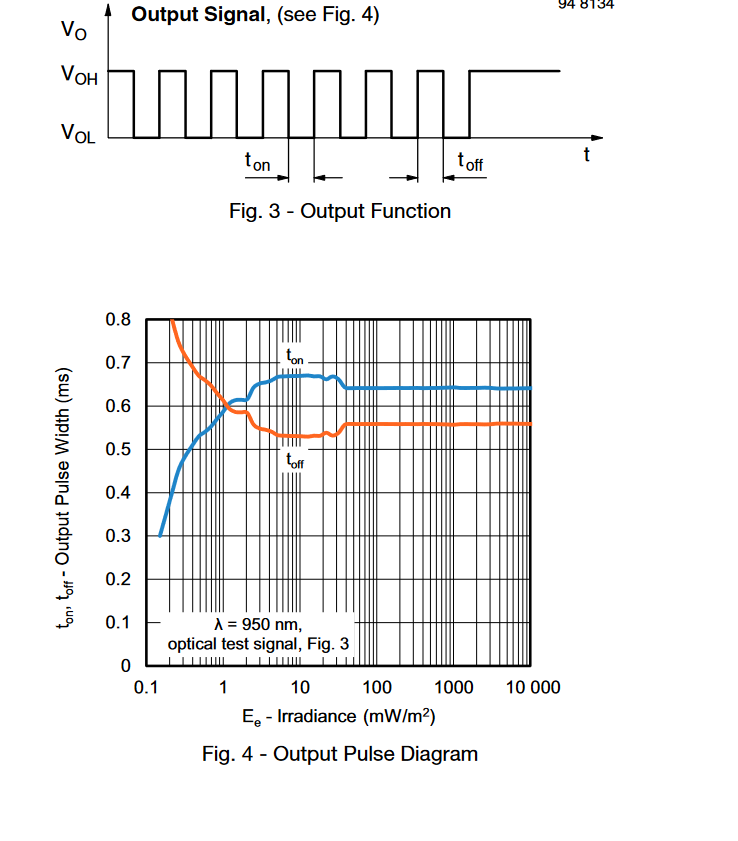
It would create much more precise detection of distance/angle when using photodiodes with ADCs because it would make the detection algorithm more accurate due to better decisions on what is reflected only on comparing it with max intensity.
-
It would not require any hardware changes to existing robots(in basically all cases) and would not require the purchase of new hardware/balls (just switch a switch on a ball).
-
It would work with all most commonly used sensors such as IR seeker V2 and all sensors based on TSOPsXXX
Of course, this change would not take place for this season.