As we really liked the communication module in the test game for its easiness to simultaneously start the robots and just standing next to the field, more or less relaxing, and watching the robots play their game, I wanted to ask when or even if documentation to this module gets released.
Just asking early, as we hope that this module is used next year more, to start designing the new robot to be ready to use this module.
1 Like
Hello, I am really happy that you liked these modules. Here is just temporal documentation, but there is everything (If I forgot something, just tell me, and I will add it (: )
https://drive.google.com/drive/folders/1SyuGOfifsgydBi3oqU_3Dr0rl4nYh_Z3?usp=sharing
I will try my best not to change footprint and pinout, so when you plan to add some kind of socket for it on your robots, It will be absolutely prefect.
But thanks for nice games in Bordeux and hope see you in Eindhoven ![]()
2 Likes
Thank you very much for all this information. Was definitely more than I expected.
Looking forward to see you next year
Hello again,
We recently made minor electrical modifications to the communication module, ordered and assembled them. As we plan to test them in the next few weeks I would like to ask, if you an also provide the application for the modules, or if we should make our own.
Furthermore it is also interesting for us if you changed the footprint or pinout as we already have planned a connector for the Module from Bordeaux.
Hello,
first of all, I am really happy that you are playing with that design and trying stuff.
When it comes to footprint it will remain the same for this year but there will be a few modifications like using ESP32 C6 and we will add a small display for showing how much time is left when the robot is penalized and also for connecting to the app.
For the app, I added the app from the last RoboCup to that drive. But maybe we will make a new version.
app – Google Drive
Discussion about new modules
Hello Bukajlag,
we are arranging to host the communication module on our robots.
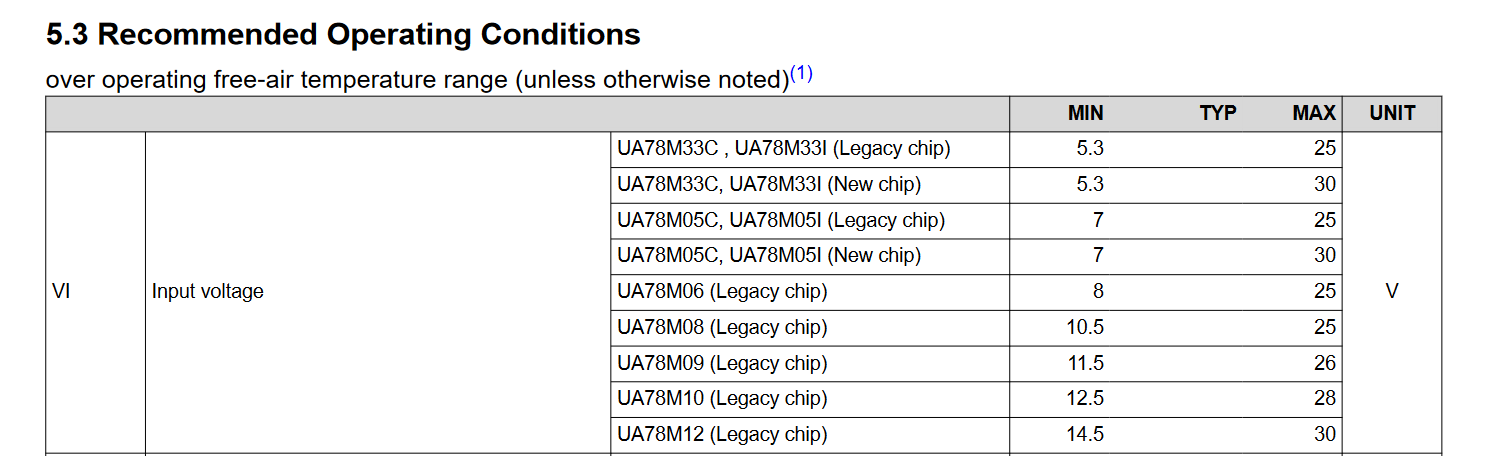
There’s an issue with VBAT upper limit : we use a 6S LIPO pack that can deliver slightly more than 25V when fully
charged.
The UA78M33CDCYR regulator data sheet by Texas Instruments states 35V as upper limit for input voltage.
Coilud you please confirm that the communication module can be safely powered with VBAT more than 25V( say 26V) ?
1 Like