Hello,
We are currently working on victim detection in the Erebus Rescue Simulation (2026), and we encountered an issue with the distance sensor.
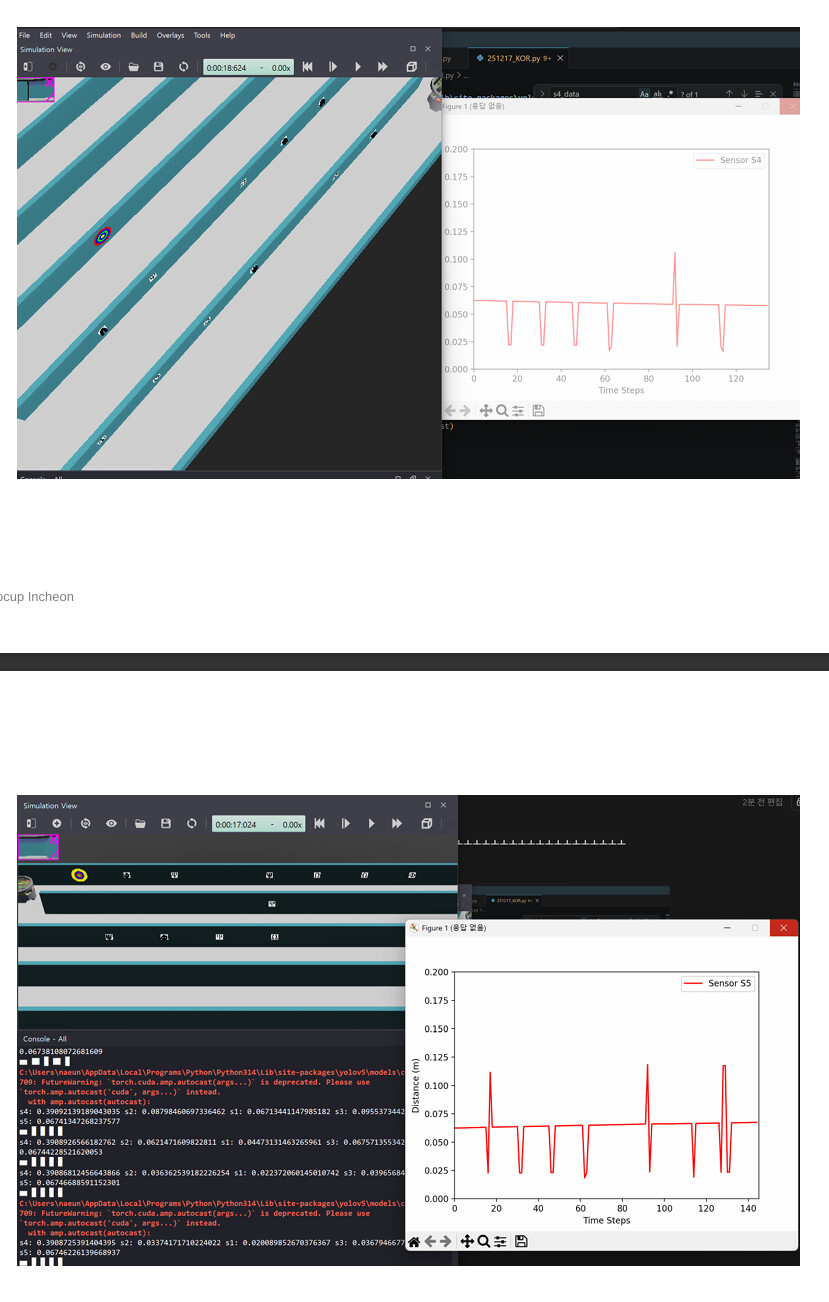
In our environment, the fake victim is slightly protruding from the wall. Based on this, we expected that the distance sensor would detect a difference between:
- a flat wall surface, and
- a protruding fake victim
However, in practice, the distance sensor readings are inconsistent. Both the wall and the fake victim sometimes return similar values (both near and far), making it difficult to reliably distinguish between them.
We have already tried:
- Measuring distance differences at multiple positions
- Approaching from different angles
- Applying threshold-based detection
But none of these methods produced stable or reliable results.
So we would like to ask:
- Is this expected behavior in the 2026 Erebus simulation?
- Are distance sensors supposed to be unreliable for detecting small protrusions like fake victims?
- Is there any recommended method to distinguish fake victims from walls (e.g., camera-based detection instead)?
Any insights or suggestions would be greatly appreciated.
Thank you!