As always, we are committed to making this event a huge success, and we are seeking innovative and exciting ideas for the Technical Challenge that will happen during the competition in Eindhoven to make it even more fun, informational, and practical for participants and spectators.
We believe that you have valuable insights and unique perspectives that can contribute to making this event a success. Therefore, we would like to invite you to suggest your proposals for the Technical Challenge that you believe would be engaging and enjoyable for participants of this event. We welcome proposals for challenges that cater to various skill levels and interests.
The cross-league collaboration ideas, such as a soccer team performing on another league’s field or a team from another league coming to the soccer field to collaborate, are also welcome.
Here is a list of the Technical Challenges from last year: Technical Challenges 2023 - PDF. Let’s discuss your proposals here on the forum under this topic.
Thank you for your interest. We look forward to hearing from you soon!
@david and I had a talk a while ago and discussed the Wi-Fi problem again. We concluded that the use of Wi-Fi is banned because of the usage in the major leagues, more precise the use of Wi-Fi 2.4/5 in these leagues.
With the ricing of Wi-Fi 6 devices and the wider range of frequencies in Wi-Fi 6, we had the idea to only allowing Wi-Fi 6 and to test this do it as a technical challenge, to look if teams can find and use Arduino WiFi-6 modules. I only found one by now, the [nRF7002 EK - Evaluation kit for nRF70 Series, Wi-Fi 6 companion ICs - nordicsemi.com](Nordic nRF7002 EK ), but it looks promising to me and I would bet, there will be more products in the near future.
You maybe had to check in with the general RoboCup committee and teams must be informed in advance, so they can prepare and maybe do a little technical presentation on their implementation and use of Wi-Fi, so we can see, if it is even necessary.
This module will help especially in this issue of communication as well as in managing the robots. I think that for this technical challenge, we can use this module as well. Also, they are less expensive.
Will post details in a short time when the new modules will be ready.
The robot is placed on the left neutral spot in fron of one of the goals, shoots the ball against the goal, the ball bounces off and the robot should catch the ball while beeing (near)the right neutral spot. Then it repeats in the oppsite direction. The team has 3-5 minutes to achieve as many pass as possible. Highest score wins.
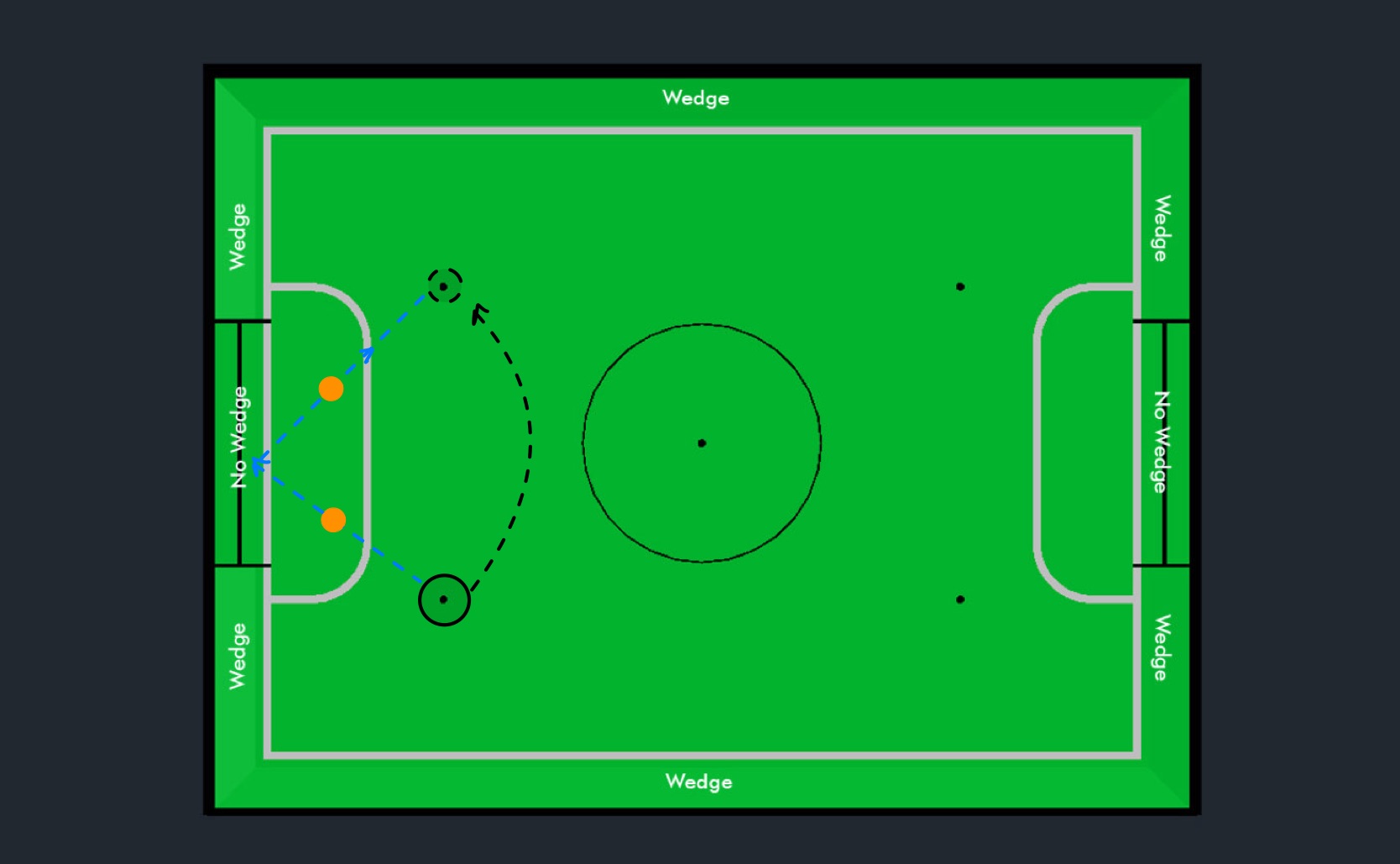
The first robot will pass the ball to the second robot and then move toward the goal. After the first robot has gone over the obstacle, the second robot can pass the ball back to the first robot and the first robot will shoot. This technical challenge demonstrate a strategy often use in real soccer competition, using ball pass to go over the defense player. The teams will need to find the fastest way to finish the challenge and score, the team that uses the shortest time to score win.